Mechanical Vibration
Web Book
Mass, Spring & Damper Elements
Learning objectives
Determine the equivalent mass, equivalent stiffness and equivalent damping in a vibrating system
Sections
2.1 Vibration energy
2.2 Stiffness element
2.3 Mass element
2.4 Damper element

2.2 Stiffness element
Any object, which deforms under the action of force and back to its original shape after the force is absent, has stiffness property.
A simple example to visualise is a helical spring, where it is suppressed if we apply a force and it is extended back when the force is released.
The force developed in the spring is proportional to the relative deformation between its two ends given by
F=kx\phantom{xxxxxxxxxxxxxxxxx}{\color{red}(2.2.1)}
where k is the stiffness constant and x is the deformation of the spring.
Animation 2.2.1 Types of spring elements in practice.
A flexible plate besides having its own mass, has also the property of stiffness. From Eq. (2.2.1), by applying the same value of force, a thin plate can be easily bended because its stiffness constant is low and thus its deformation is high. However for a thick plate, the deformation is small because its stiffness constant is high.
Equation (2.2.1) implies that the deformation of the spring is linearly proportional to the applied force. This type of spring is called linear spring.
There also exists a spring where deformation becomes harder as the force is increased, called hardening spring. In contrary, the spring where the deformation becomes greater even with slightly increase of force is called softening spring. Both are known as non-linear springs.

2.2.1 Translational stiffness constant
The translational stiffness constant is obtained from a translational deformation due to a linear force. Consider a cantilever beam with length L as shown in Figure 2.2.1 where force F is applied at the free-end and gives linear displacement x . The force developed at the end is given by
F=\displaystyle\left(\frac{3EI}{L^3}\right)x\phantom{xxxxxxxxxxxxxx}{\color{red}(2.2.2)}
where E is the Young’s modulus and I=bh^3/12 is the second moment of area of the beam with b the width of the beam and h the thickness.
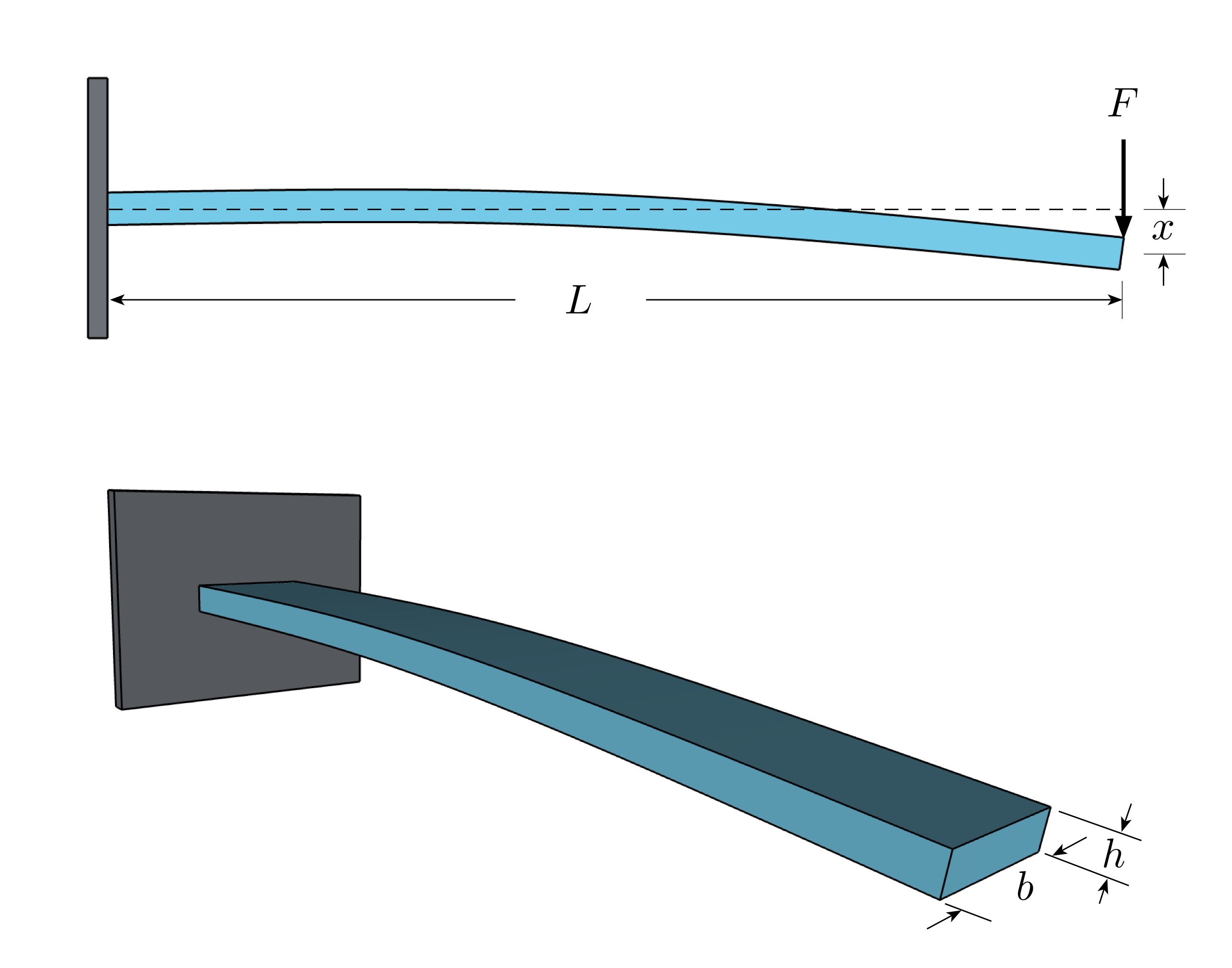
Figure 2.2.1 Deflection of a fixed-free beam under a translational force.
From Eq. (2.2.1), the stiffness constant of the beam is
k=\displaystyle\frac{F}{x}=\frac{3EI}{L^3}\phantom{xxxxxxxxxxxxxx}{\color{red}(2.2.3)}
Equation (2.2.3) applies only for the type of deformation as shown in Figure 2.2.1. And the value of the stiffness constant is only for that at the tip of the beam.
For other types of deformation (mode shape) and forcing location, the stiffness constant is different. The deformation (and thus the stiffness) is also affected by the support condition of the beam structure, for example clamped edges or pinned edges.
2.2.2 Rotational stiffness constant
An engineering structure can also be subjected to a torque which results in a rotational deformation. This gives rotational or torsional stiffness constant.
Figure 2.2.1 shows a rod having length L which is rigidly fixed on a wall. At the edge of the rod is a rotational displacement \theta due to an applied torque T given by
T=\displaystyle\left(\frac{GJ}{L}\right)\theta\phantom{xxxxxxxxxxxxxx}{\color{red}(2.2.4)}
where G is the shear modulus and in this case, J is the torsional moment of cross sectional area of the rod.
The rotational/torsional stiffness constant is thus given by
\displaystyle k_r=\frac{T}{\theta}=\frac{GJ}{L}\phantom{xxxxxxxxxxxxxx}{\color{red}(2.2.5)}
Some of the stiffness constant for various structures are given in Figure 2.7 and 2.8 for particular force location and vibration mode shape.
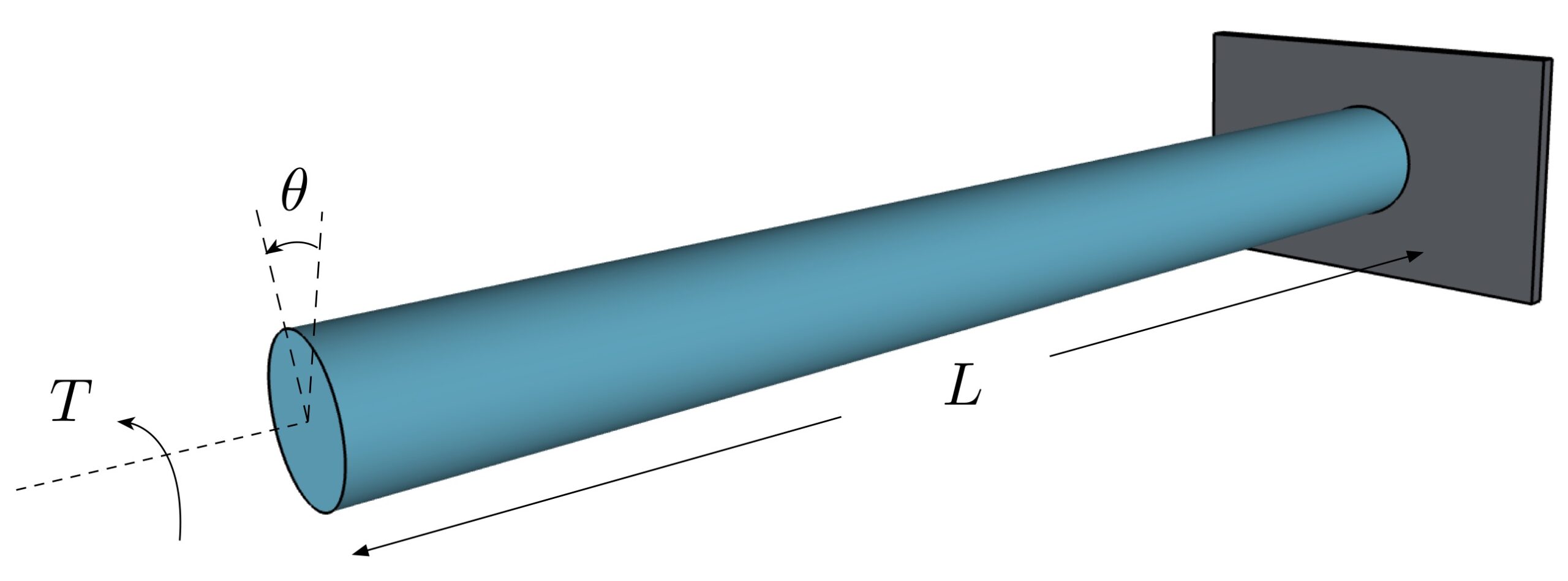
Figure 2.2.2 Rotational deflection of a fixed-free rod under torque.